本文共 4135 字,大约阅读时间需要 13 分钟。
推荐
分享一个大神的人工智能教程。零基础!通俗易懂!风趣幽默!还带黄段子!希望你也加入到人工智能的队伍中来!
我的网站:
我的知乎:
SPI(Serial Perripheral Interface)串行外设通信接口,主要实现设备(主从)之间的通信。硬件上由CS、SCK、MISO、MOSI四根通信线连接而成。关于SPI更多介绍不再详细描述,本文主要以STM32F103为主机、W25Q16为从机进行SPI通信实验。
本文将提供STM32硬件SPI、软件模拟SPI两实例工程代码供大家参考、掌握两种方式的区别。
STM32硬件SPI:控制简单、运行效率高、使用方便等。
软件模拟SPI:移植性强,只需要简单修改接口,就能在其他MCU芯片(如:51、430等)上使用。
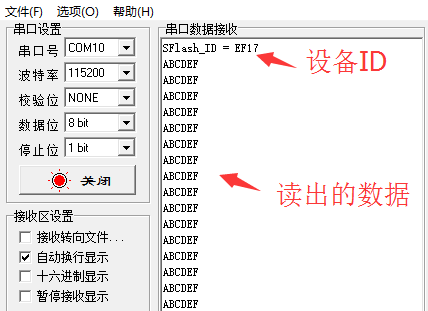
实例实验效果:
两个实例SPI通信控制方式不一样,但实验效果是一样的。
W25Q16设备ID:
上电,读取W25Q16设备ID,并通过串口打印出来;
写数据:
SFLASH_WriteNByte((uint8_t*)"ABCDEF",0, 6); 通过该函数在W25Q16的0地址处 连续写入6字节“ABCDEF”数据。(测试的时候:第一次下载之后让程序运行一次,即写入W25Q16数据。再将该函数屏蔽、下载。断电重新让程序运行看读出来的数据是否是前面写入的数据)
读数据:
SFLASH_ReadNByte(read_buf,0, 6); 通过该函数从W25Q16的0地址连续读取6字节数据,保存在read_buf里面。(地址、数据及数据长度都可以修改,但读写的地址要相同,读出来的数据才是写入的数据)
关于本文的更多详情请往下看。
Ⅱ、实例工程下载
笔者针对于初学者提供的例程都是去掉了许多不必要的功能,精简了官方的代码,对初学者一看就明白,以简单明了的工程供大家学习。
笔者提供的实例工程都是在板子上经过多次测试并没有问题才上传至360云盘,欢迎下载测试、参照学习。
提供下载的软件工程是基于Keil(MDK-ARM) V5版本、STM32F103ZE芯片,但F1其他型号也适用(适用F1其他型号: 关注微信,回复“修改型号”)。
STM32F10x_SPI(硬件接口)读写Flash(25Q16)实例源代码工程:
STM32F10x_SPI(软件模拟)读写Flash(25Q16)实例源代码工程:
STM32F1资料:
访问密码 ca90
Ⅲ、STM32硬件SPI
STM32所有系列芯片都带有SPI硬件控制器,根据芯片型号不同,SPI数量也不同,有些有一个SPI,有些有3个SPI。STM32的SPI控制器功能也是很强大的,只需要简单的配置就能高效的进行SPI通信。
1.SPI原理
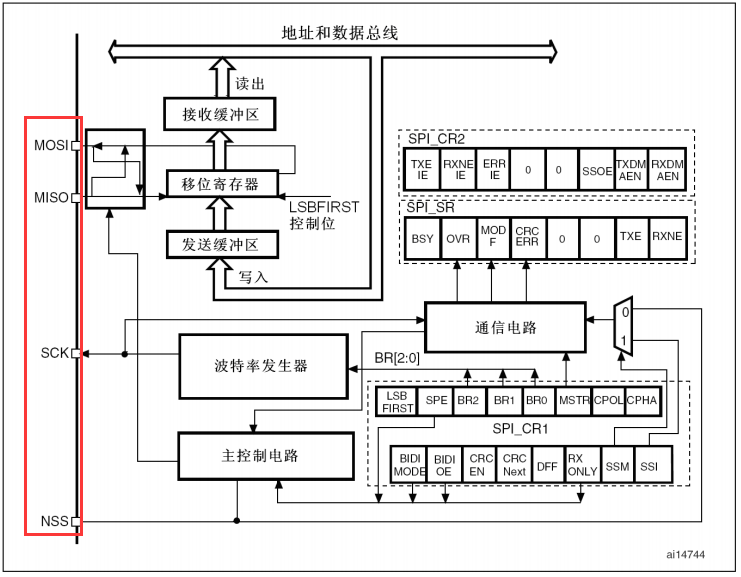
上面是SPI的系统框图,来自STM32F1的参考手册.
A.引脚
MOSI:主设备输出/从设备输入引脚。该引脚在主模式下发送数据,在从模式下接收数据。
MISO:主设备输入/从设备输出引脚。该引脚在从模式下发送数据,在主模式下接收数据。
SCK:串口时钟,为通信提供时钟。(作为主设备的输出,从设备的输入)。
NSS:从设备选择。这是一个可选的引脚,用来选择主/从设备。它的功能是用来作为“片选引脚”,让主设备可以单独地与特定从设备通讯,避免数据线上的冲突。
B.缓冲区SPI->DR
发送缓冲区:只要往SPI1->DR写入数据,它自动将存入发送缓冲区,并执行发送操作。这就是高效的一点,而不像模拟SPI,还需要我们控制时钟,控制MOSI引脚输出高低电平。
接收缓冲区:原理和发送缓冲区差不多,只是这个是接收数据。接收满了,才通知我们需要去读取数据。
C.波特率发生器
STM32的硬件SPI还可以通过配置来控制通信的速度。
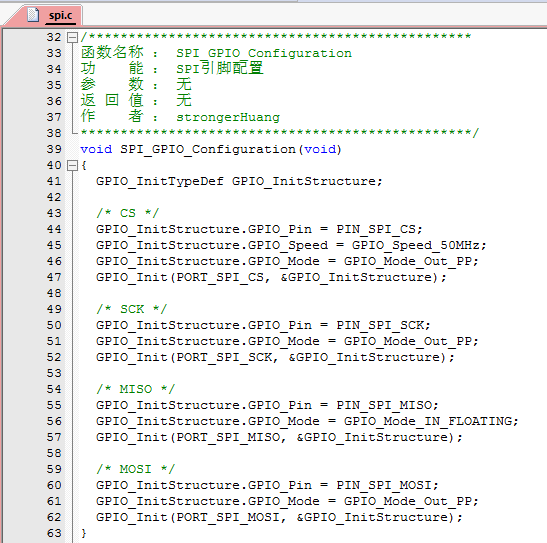
2.SPI引脚
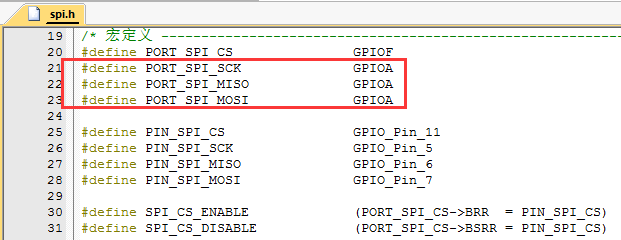

该函数位于文件下面;
使用的SPI需与引脚对应,CS片选信号我们这里是通过普通IO来控制的,若不同请在spi.h里面修改为你开发板上的引脚。
配置
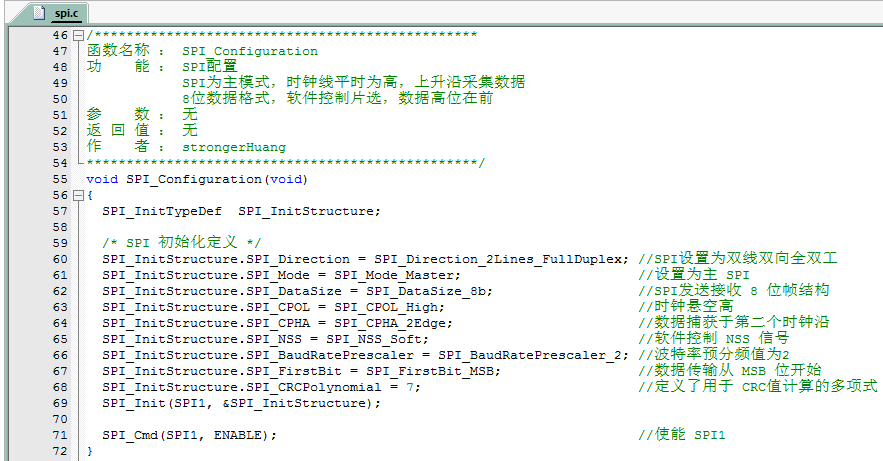
spi.c文件下面;
该函数是文章的重要一项,主要是对硬件SPI进行的一些初始化配置。
SPI为主模式,时钟线平时为高,上升沿采集数据,8位数据格式,软件控制片选,数据高位在前。
1.传输方向:SPI_Direction =SPI_Direction_2Lines_FullDuplex;
总共有四个方式:
两线全双工:SPI_Direction_2Lines_FullDuplex
两线只接收:SPI_Direction_2Lines_RxOnly
单线只接收:SPI_Direction_1Line_Rx
单线只发送:SPI_Direction_1Line_Tx
2.模式:SPI_Mode = SPI_Mode_Master;
总共有两种模式:
主机模式:SPI_Mode_Master
从机模式:SPI_Mode_Slave
3.数据:SPI_DataSize = SPI_DataSize_8b;
8位数据长度:SPI_DataSize_8b
16位数据长度:SPI_DataSize_16b
4.时钟极性:SPI_CPOL = SPI_CPOL_High;
也就是我们平时不操作时,时钟的电平。
低电平:SPI_CPOL_Low
高电平:SPI_CPOL_High
5.时钟相位:SPI_CPHA = SPI_CPHA_2Edge;
也就是我们需要等多少个“时钟”操作通信口MOSI、MISO。
1个时钟:SPI_CPHA_1Edge
2个时钟:SPI_CPHA_2Edge
6.片选信号:SPI_NSS = SPI_NSS_Soft;
也就是我们如果控制NSS片选引脚;
软件控制:SPI_NSS_Soft
硬件控制:SPI_NSS_Hard
7.波特率(时钟)分频:SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_2;
也就是我们控制SPI通信的速率,和USART串口的波特率类似。
这里的参数有很多种,请见源代码。
8.第一位传输数据:SPI_FirstBit = SPI_FirstBit_MSB;
在一根通信线上一字节(8Bit)数据分8次传输才能完成,这里是高位先传输,还是低位先传输的意思。
高位:SPI_FirstBit_MSB
低位:SPI_FirstBit_LSB
9.校验:SPI_CRCPolynomial = 7;
校验的数据位长度。
4.SPI读写数据
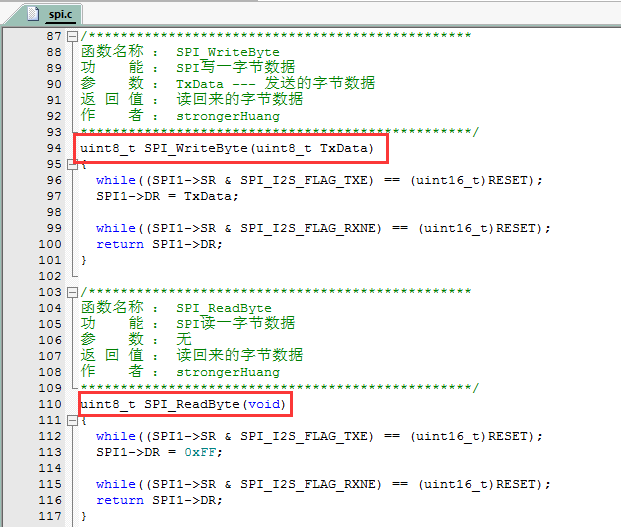
函数位于spi.c文件下面;
这两个函数就是我们使用到的接口,在上面SPI配置好之后,操作这两个函数就可以控制其引脚读写了。
这两个函数就是我们上面说的“发送缓冲区”和“接收缓冲区”所需要使用到的部分。
这里需要注意:发送和接收数据都是通过SPI->DR寄存器,读、写操作会控制数据的流向。
Ⅳ、软件模拟SPI
从51学习过来的朋友就应该知道,51的资源很少,没有SPI硬件控制器,要想使用SPI通信方式,就需要使用IO口模拟的方式来实现SPI通信。只需要按照通信的时序就能控制其通信。
使用软件模拟SPI通信有优点,也有缺点。
优点:移植很方便,代码只需要简单修改就可以使用在其他芯片上;
缺点:控制IO麻烦,对时序要求高;
1.模拟SPI引脚

该函数位于spi.c文件下面;
这个主要配置模拟SPI引脚。(如果你板子上使用的引脚不同,请修改spi.h文件的定义即可)
2.模拟SPI初始化

该函数位于spi.c文件下面;
这里初始化需要把状态定好,不然第一次操作会有问题。
3.模拟SPI写函数(时序)
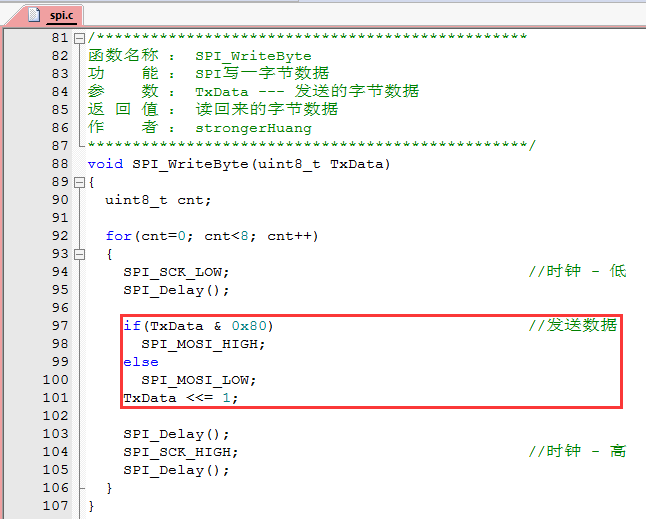
该函数位于spi.c文件下面;
这种时序的写法在学习过51的朋友来看再熟悉不过了。
注意:
1、高字节在前,说以上面红色标记的的部分就是将高位先输出,依次移位输出。
2、在时钟的上升沿将数据输出,所以在“时钟-高”之前将数据输出。
4.模拟SPI读函数(时序)
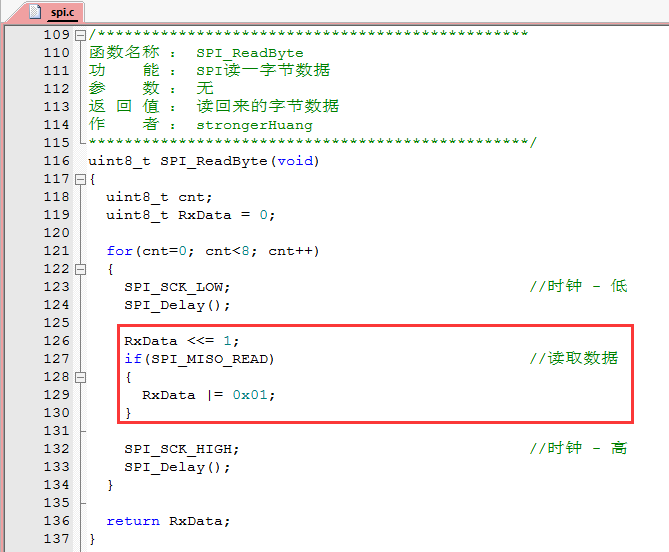
该函数位于spi.c文件下面;
读时序和写时序原理类似,但还是存在差异。
注意:
1、高位先输出来(从机输出),所以,需要将读取的数据依次移向高位。
2、在时钟的下降沿读出数据,所以,我红色标记的部分可以看得出来,是在时钟为低之后才去读取数据。
Ⅴ、修改代码,适应开发板
看见这篇文章,你可能觉得芯片型号(STM32F103ZE)不是你的芯片芯片型号,硬件接口(SPI1)、(USART1)也不是板子上的接口,那怎么办呢,其实很简单,适当修改一下就行。
1.修改芯片型号
该工程适合STM32F1系列的所有芯片,只需要修改一下型号。修改芯片型号,可以看我的另外一篇文章:如何将工程(修改来)运行在自己开发板上;
当然,其他系列(F0、F2、F3、F4等)也可以使用该配置,但需要更换外设库。
2.修改硬件接口
笔者提供的工程源代码,在个人看来整理的还算比较整洁(名称清晰、排版整齐、文件分类明确)、相比很多开发板卖家提供的例程来说,要好的多。所以,看了之后,你应该知道如何修改。
1、LED灯的IO,位于bsp.h下,修改为你的LED灯IO口就行了。
2、USART,本文是使用USART1,如果你使用USART2的话,需要usart.c文件下“USART_GPIO_Configuration”引脚配置、USART_Configuration串口配置、发送接收函数USART1 改为USART2等。
3、SPI接口
这个在上面讲述中都提及了修改,就是修改spi.c和spi.h文件里面的配置。
Ⅵ、说明
该文有点面向应用的朋友,但为提及W25Q16相关的内容,如有需要了解可以在微信留言。
关于笔者提供的软件工程实例,可关注微信,在会话框回复“关于工程”,有关于工程结构描述、型号修改等讲述。
以上总结仅供参考,若有不对之处,敬请谅解。
Ⅶ、最后
我的网站:
我的微信公众号(ID:strongerHuang)还在分享STM8、STM32、Keil、IAR、FreeRTOS、UCOS、RT-Thread、CANOpen、Modbus…等更多精彩内容,如果想查看更多内容,可以关注我的微信公众号。
